")
")
")
")
Original Arduino® ASX00003 - ARDUINO MKR MOTOR CARRIER

Cart 0 row rows (empty)
No products
To be determined Shipping
0,00 € Total
Product successfully added to your shopping cart
Quantity
Total
There are 0 items in your cart. There is 1 item in your cart.
Total products
Total shipping To be determined
Total
Arduino® MKR
- 3D printing
- Antennas
- Batteries
- Arduino
- Audio/video
- Automotive
- Automation
- BBC micro:bit
- Electronic components
- Sensors
- Actives
- Passives
- Component kits
- Security alarm
- IOT
- Soldering
- Soldering irons
- Bench supports
- Soldering flux/paste
- Solder wires
- Soldering tools
- Gas soldering irons
- Hot Air Stations
- SMD soldering
- Tip cleaning
- Desoldering braids/pumps
- Spare parts Pace
- Spare parts Proskit
- Spare parts Thermaltronics
- Spare parts for Velleman
- Spare parts Weller
- Spare parts Xytronic
- Misc soldering
- Spare parts Pinecil
- Spare parts Atten
- Raw cables and wires
- RF coaxial cable 50ohm
- RF coaxial cable 75ohm
- Audio cables/wires
- LV data cables
- FFC cables
- Speaker cables
- Power cables
- Rubber cables
- Copper wires
- Flat cables
- Multicore equipment wires
- Phone cables
- Silicone wires
- Thermocouple cable
- Network cables CAT5/6/7
- Video cables
- Singlecore equipment wire
- Wire assortments
- Power supply cables
- Wiring accessories
- Development boards
- Books
- Leds
- Connectors
- Audio/video connectors
- Car connectors
- Pin header connectors
- RJ modular connectors
- Crimp connectors
- RF connectors
- 7/16 coaxial connectors
- BNC connectors
- F connectors
- FME connectors
- IEC antenna connectors
- MCX connectors
- MMCX connectors
- MiniUHF connectors
- N connectors
- SMA connectors
- SMB connectors
- SMC connectors
- SSMB connectors
- TNC connectors
- UHF connectors
- U.FL-connectors
- RF-test connectors /switch
- RF cables
- Misc coaxial connectors
- Terminal blocks
- Industrial connectors
- Data connectors
- DC power connectors
- Connector adapters
- Thermal management
- Mechanics
- Displays
- Measurement
- Multimeters
- Test leads/connectors
- Panel meters
- Current clamps
- Voltage testers
- Thermometers
- Environment meters
- Electronic loads
- Component testing
- Fibre Optic Network Meters
- Mains measurement
- Debugging
- Oscilloscopes
- Signal generators
- Misc measurement
- Spectrum analyzers
- Logic analyzers
- Probes
- Data loggers
- Measurement accessories
- Rigol accessories
- Rigol options
- Memory cards
- Services
- Phones
- Prototyping
- DIY kits
- Raspberry Pi
- Raspberry Pi 5
- Raspberry Pi 4 and older
- Raspberry Pi Compute Module
- Raspberry Pi 400 / 500
- Raspberry Pi Pico
- Raspberry Pi Zero
- Raspberry Pi starter kits
- Raspberry Pi like computers
- SBC displays
- SBC addon boards
- SBC hifi boards
- SBC accessories
- SBC housing
- SBC cameras
- SBC misc
- SBC books
- SBC memory cards
- SBC rack mount
- Retro gaming
- Robotics
- Misc
- Electromechanics
- Switches
- Push-button switches
- Vandal proof PB switches
- Arcade switches
- Rocker switches
- Slide switches
- Micro switches
- Door bell switches
- Rotary encoders
- Rockwell industrial switches
- Toggle switches
- Position switches
- Keylock switches
- DIP switches
- Foot switches
- Joystick
- Appliance switches
- Tactile switches
- Rotary switches
- TV power switches
- Lamps
- Motors
- Relays
- Solenoids
- Fuses
- Thermostats
- Contactors
- Switches
- Electrics
- Power supplies
- Computer
- Telecom
- Ethernet/LAN
- RJ45 connectors
- Tools for network cabling
- Ethernet accessories
- Ethernet patch cables
- RJ45 modules
- SLIM® CAT6 Ethernet cables
- SLIM® CAT6 Patchcords FLAT U/UTP
- SLIM® CAT6 Patchcords FLAT U/FTP
- SLIM® CAT6A Patchcords FLAT U/FTP
- SLIM® CAT6 Patchcords ROUND U/UTP
- SLIM® CAT6 Patchcords ROUND U/FTP
- SLIM® CAT6A Patchcords ROUND U/FTP
- SLIM® CAT6 Patchcords FLAT U/UTP with Nylon sheath
- SLIM® CAT6 Patchcords FLAT U/FTP with Nylon sheath
- Patch Panels
- Optical fibres
- SFP Transceivers
- WiFi
- Ethernet switches
- Ethernet media converters
- Routers
- Gateways
- Ethernet/LAN
- TV/radio/VCR/CD
- Tools and handtools
- Lightning
- Gadgets
- Agencies Elgood Oy
- Abiko (Elpress)
- Adda
- Arduino Pro
- Attend
- BELDEN
- Blueferrite
- Broadlake
- Cvilux
- Danotherm
- DECA
- Delta
- Dinkle
- Entertec
- Finder
- Finder 12 Series
- Finder 13 Series
- Finder 14 Series
- Finder 1C Series
- Finder 20 Series
- Finder 22 Series
- Finder 34 Series
- Finder 36 Series
- Finder 38 Series
- Finder 39 Series
- Finder 40 Series
- Finder 41 Series
- Finder 43 Series
- Finder 46 Series
- Finder 48 Series
- Finder 4C Series
- Finder 58 Series
- Finder 50 Series
- Finder 55 Series
- Finder 56 Series
- Finder 60 Series
- Finder 62 Series
- Finder 65 Series
- Finder 66 Series
- Finder 68 Series
- Finder 7H Series
- Finder 7L Series
- Finder 7M Series
- Finder 7T Series
- Finder 80 Series
- Finder 83 Series
- Finder 86 Series
- Finder 8A Series
- Finder 90 Series
- Finder 92 Series
- Finder 93 Series
- Finder 94 Series
- Finder 95 Series
- Finder 96 Series
- Finder 99 Series
- Fulham Company B.V
- Geehy
- Hengstler
- Hirose
- HolyStone
- Jianghai
- KDS
- Lantronix
- LINEAR INTEGRATED SYSTEMS
- LinkPP
- Luminus
- MURATA
- Myrra
- PeakTech
- Provertha
- Quectel
- Relpol
- Rigol
- Rigol accessories
- Rigol options
- Rigol DG800 Pro
- Rigol DG900 Pro
- Rigol DG1000Z
- Rigol DG4000
- Rigol DG5000 Pro
- Rigol DHO800
- Rigol DHO900
- Rigol DHO1000
- Rigol DHO4000
- Rigol DHO5000
- Rigol DL3000
- Rigol DM3000
- Rigol DP700
- Rigol DP800
- Rigol DP900
- Rigol DP2000
- Rigol DS1000Z
- Rigol DS2000
- Rigol DSA700
- Rigol DSA800
- Rigol DSA800
- Rigol MHO2000
- Rigol MHO5000
- Rigol MSO5000
- Rigol MSO7000
- Rigol MSO8000A
- Rigol RSA3000
- Rigol RSA5000
- Seiko
- Sensepeek
- SENSOLUTE
- Teltonika Networks
- Teltonika Telematics
- VAC
- Winstar
- wireless-tag
- WKK
- News Letters
- Campaigns
- Intermediary sales
The MKR Motor Carrier is an MKR add-on board designed to control servo, DC, and stepper motors. The Carrier can also be used to connect other actuators and sensors via a series of 3-pin male headers
The summary of features is shown below:
- Compatible with all the boards in the MKR family
- Four servo motor outputs
- Four DC motor outputs (two high performance + two standard performance)
- Sensing of current feedback for the high-performance motors
- Two inputs for encoder sensors
- Four inputs for analog sensors (3-pin compatible)
- Possibility to read the status of the batteries
- ON-OFF switch with Power ON LED
- LiPo battery connector (2S or 3S compatible) and power terminal block for alternative power source
- LEDs to visually indicate the direction of the rotation of the DC motors
- On-board processor for automated control of some of the outputs
- I2C connector as a 4-pin male header
Tech Specs
MICROCONTROLLER | ATSAMD11 ( Arm Cortex-M0+ processor) |
MAX CURRENT (MC33926) | 5 Amps Peak, RMS current depending on the degree of heat sink provided |
MAX CURRENT (DRV8871) | 3 Amps peak, current limited by current sense resistor. |
RATED VOLTAGE | 6.5 to 11.1V |
REVERSE CURRENT PROTECTION | Yes |
OVER TEMPERATURE SHUTDOWN PROTECTION (FOR DC MOTOR DRIVERS) | Yes |
CLOCK SPEED | 48 Mhz |
ON BOARD VOLTAGE REGULATOR | 5V |
INTERFACE | Terminal block and 3 pin/4 pin header connector |
COMPATIBILITY | MKR Family |
The MKR Motor Carrier features two MC33926 motor drivers for high-performance DC motor control with direct connection to the MKR1000, current feedback, and capacity for up to 5 Amps (peak). In addition, there are two DRV8871 drivers that are controlled from a SAMD11 microcontroller that communicates with the MKR1000 via I2C (SPI optional). The SAMD11 is also used to control the servos, read the encoders, and read the battery voltage. There is an interrupt line connecting the SAMD11 (on PA27) and the MKR board.
Note that for extended use or high-current motors, an extra heatsink (and eventually a fan) might be required for the drivers.
When plugging the MKR1000 and the Motor Carrier, some of the pins will stop being available for you to use in your code, as they will be needed to control some of the features of the Carrier. For example, the current feedback from the two MC33926 drivers is connected directly to some of the analog pins on the MKR1000. The following list explains which pins of the MKR1000 are used to control the Carrier:
- Analog pin A3 for current feedback from Motor3
- Analog pin A4 for current feedback from Motor4
- Digital pin D2 for IN2 signal for Motor3
- Digital pin D3 for IN1 signal for Motor3
- Digital pin D4 for IN2 signal for Motor4
- Digital pin D5 for IN1 signal for Motor4
- Digital pin D6 for Interrupt signal from the SAMD11 to the MKR1000
- Digital pin D11 for the SDA signal (I2C)
- Digital pin D12 for the SCL signal (I2C)
Also, some pins can optionally be connected via a soldering jumper or a 0 Ohm resistor. These pins are:
- Digital pin D1 for the SF signal from the MC33926 drivers (optional)
- Digital pin D7 for the SPI SS signal (optional)
- Digital pin D8 for the SPI MOSI signal (optional)
- Digital pin D9 for the SPI SCK signal (optional)
- Digital pin D10 for the SPI MISO signal (optional)
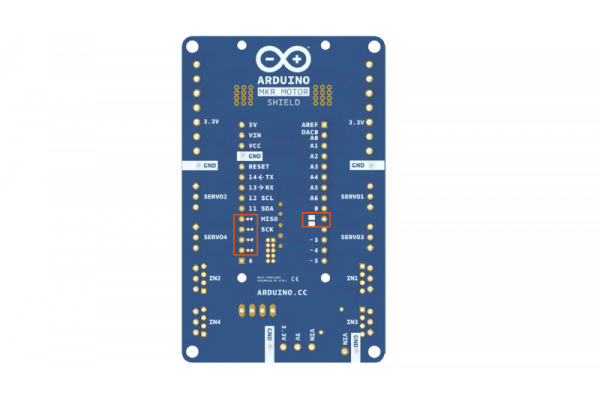
To use the Carrier, you will need to plug an MKR board (the MKR1000, MKR Zero, or other) on the headers at the center of the board. Make sure the MKR board is connected in the proper direction. You can do this by making sure the info printed on the side of the headers are matching for both the MKR board and the Motor Carrier.
Once the board is properly connected to the Motor Carrier, you can start programming the board. To control the motors, you will need to import the MKR Motor Carrier library. You can find more information about the library here. If you want to read more about how to install a library then you follow this link.
When working with motors, you will need an external source to feed the motor drivers and power up the motors. You can do this by connecting a LiPo Battery to the battery connector or using an external power source and connecting it to the VIN input on the terminal block. It is recommended to do these operations with the power switch at the OFF position. Once the external power is connected to the board, the power switch can be turned on.
| EAN | 7630049200203 |
| click for more info | |
| Manufacturer | Arduino |
| Manufacturer's model | ASX00003 |
| Compatible | Arduino MKR |